1. Giới Thiệu Về Cánh Tay Robot Servo
Cánh tay robot servo là một thiết bị cơ điện được điều khiển bằng động cơ servo, giúp thực hiện các chuyển động chính xác theo yêu cầu. Đây là một phần quan trọng trong lĩnh vực tự động hóa và robot công nghiệp, thường được sử dụng trong sản xuất, nghiên cứu, giáo dục và nhiều ứng dụng khác.
2. Nguyên Lý Hoạt Động
Cánh tay robot servo hoạt động dựa trên động cơ servo - loại động cơ có khả năng kiểm soát vị trí, tốc độ và mô-men xoắn chính xác. Nguyên lý hoạt động của nó bao gồm:
Một cánh tay robot servo cơ bản thường bao gồm:
Cánh tay robot servo có rất nhiều ứng dụng thực tiễn trong các lĩnh vực khác nhau:
Khi chọn mua hoặc chế tạo cánh tay robot servo, cần xem xét các yếu tố sau:
Cánh tay robot servo là một công cụ mạnh mẽ trong lĩnh vực tự động hóa và robot học. Nhờ vào khả năng kiểm soát chính xác và linh hoạt, chúng đóng vai trò quan trọng trong nhiều ứng dụng từ công nghiệp đến đời sống. Việc nghiên cứu và phát triển công nghệ này sẽ tiếp tục mở ra nhiều cơ hội mới trong tương lai.
Cánh tay robot servo là một thiết bị cơ điện được điều khiển bằng động cơ servo, giúp thực hiện các chuyển động chính xác theo yêu cầu. Đây là một phần quan trọng trong lĩnh vực tự động hóa và robot công nghiệp, thường được sử dụng trong sản xuất, nghiên cứu, giáo dục và nhiều ứng dụng khác.
2. Nguyên Lý Hoạt Động
Cánh tay robot servo hoạt động dựa trên động cơ servo - loại động cơ có khả năng kiểm soát vị trí, tốc độ và mô-men xoắn chính xác. Nguyên lý hoạt động của nó bao gồm:
- Điều khiển xung PWM (Pulse Width Modulation): Servo motor nhận tín hiệu xung từ vi điều khiển để xác định góc quay.
- Cảm biến phản hồi: Hệ thống servo có cơ chế phản hồi, thường sử dụng encoder hoặc potentiometer, để đảm bảo vị trí chính xác.
- Vi điều khiển: Các vi điều khiển như Arduino, Raspberry Pi hoặc PLC giúp lập trình và kiểm soát chuyển động của cánh tay robot.
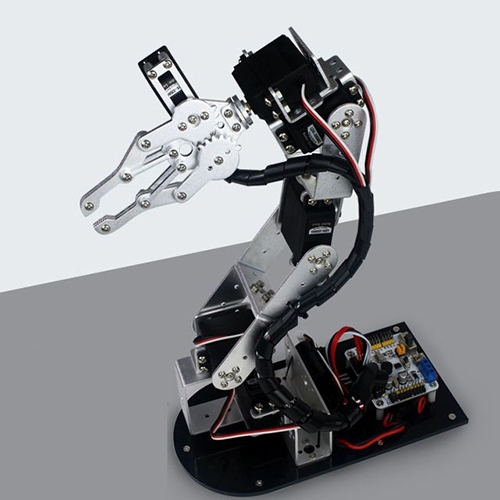
Một cánh tay robot servo cơ bản thường bao gồm:
- Động cơ servo: Đóng vai trò quan trọng trong việc di chuyển các khớp của robot.
- Khung và cánh tay: Làm bằng kim loại hoặc nhựa, có thể có nhiều khớp nối để tạo sự linh hoạt.
- Bộ điều khiển trung tâm: Thường là Arduino, STM32, hoặc vi điều khiển khác.
- Nguồn cấp điện: Cung cấp năng lượng ổn định cho động cơ và mạch điều khiển.
- Cảm biến và mô-đun giao tiếp: Như cảm biến lực, cảm biến góc hoặc camera để tăng cường khả năng tự động hóa.
Cánh tay robot servo có rất nhiều ứng dụng thực tiễn trong các lĩnh vực khác nhau:
- Sản xuất công nghiệp: Dùng trong dây chuyền lắp ráp, hàn, sơn, hoặc đóng gói sản phẩm.
- Y tế: Ứng dụng trong phẫu thuật từ xa, trợ giúp phục hồi chức năng.
- Giáo dục và nghiên cứu: Giúp sinh viên, nhà nghiên cứu thử nghiệm các thuật toán điều khiển.
- Ứng dụng dân dụng: Dùng trong mô hình robot tự động, robot phục vụ.
Khi chọn mua hoặc chế tạo cánh tay robot servo, cần xem xét các yếu tố sau:
- Số lượng bậc tự do (DOF - Degrees of Freedom): Càng nhiều bậc tự do, robot càng linh hoạt.
- Loại servo motor: Servo analog hay digital, mô-men xoắn cần thiết.
- Khả năng mở rộng: Hỗ trợ các cảm biến, giao tiếp với hệ thống điều khiển khác.
- Ngân sách và mục đích sử dụng: Phù hợp với yêu cầu kỹ thuật và tài chính.
Cánh tay robot servo là một công cụ mạnh mẽ trong lĩnh vực tự động hóa và robot học. Nhờ vào khả năng kiểm soát chính xác và linh hoạt, chúng đóng vai trò quan trọng trong nhiều ứng dụng từ công nghiệp đến đời sống. Việc nghiên cứu và phát triển công nghệ này sẽ tiếp tục mở ra nhiều cơ hội mới trong tương lai.